Mars stifinder
Mars Pathfinder
Space Probe
 Pathfinder og Sojourner inden deres lancering i oktober 1996.
Pathfinder og Sojourner inden deres lancering i oktober 1996.
| Organisation | JPL - NASA |
|---|---|
| Domæne | Teknologisk demonstrant |
| Status | Mission fuldført |
| Start | 4. december 1996 |
| Launcher | Delta II 7925 |
| Afslutning af missionen | 27. september 1997 |
| COSPAR identifikator | 1996-068A |
| Websted | Officielt websted |
| Masse ved lanceringen | 870 kg |
|---|---|
| Masseinstrumenter | 25 kg (inklusive rover ) |
| Ergols | Hydrazin |
| Drivmasse | 94 kg |
| Av | 130 m / s (krydstogtgulv) |
| IMP | Kamera |
|---|---|
| ASI / MET | Vejrstation |
| APXS | Alpha Particle og X-Ray Spectrometer |
Mars Pathfinder er enlander-formrumsonde, der er udviklet af denamerikanske rumfartsorganisation,NASA, der landede på planetenMarspå4. juli 1997i Ares Vallis , i Chryse Planitia-regionen . Hovedrumfartøjet er frem for alt en billig teknologisk demonstrator, der validerer brugen af en ny blød landingsteknik på Mars ved hjælp af airbags og bruger for første gang på Mars en lille mobil robot ( astromobile ), Sojourner .
Mars Pathfinder er NASAs første mission til jorden på Mars siden Viking- programmet , der fandt sted i 1976, 20 år tidligere. Oprindeligtbestod forskningscenterprojektet Ames , kaldet MESUR , af at skabe et netværk med 16 stationer udstyret med sensorer (seismometer, meteorologisk station osv.), Der blev bragt til Mars jord med meget enkle rumfartøjer. De skyhøje omkostninger ved dette projekt, budgetbegrænsninger og afvisningen fra den nye administrator af NASA om at udvikle dyre missioner resulterer i et projekt næsten blottet for videnskabeligt indhold, som er overdraget til Jet Propulsion Laboratory . Mars Pathfinder er den anden mission i NASAs Discovery- program, der samlerbillige solsystemudforskningsprojekter .
Mars Pathfinder- missionen opfylder helt de begrænsede mål, der er sat for den, og slutter den27. september 1997. Den nyttelast , reduceret til en vejrstation , et kamera og en spektrometer om bord på Sojourner rover , giver lidt nye videnskabelige oplysninger. På den anden side kommunikeres detaljerne for fremskridtene i en rummission for første gang i realtid til offentligheden med understøttende billeder takket være generaliseringen af Internettet, mediedækning, der har været enormt vellykket. De testede tekniske innovationer, landingssystemet med airbags og brugen af en rover vil blive genbrugt af Mars Exploration Rover- missioner, der blev lanceret i 2003.
sammenhæng
I begyndelsen af 1990'erne blev den eneste dybdegående, in situ udforskning af Mars overflade udført af rumsonder fra NASAs Viking- program, der landede på planetens overflade i 1976. Disse faste landere kunne ikke kun udføre begrænsede scanninger ved landingsstedet. I begyndelsen af 1990'erne overvejede virksomhederne i det amerikanske rumagentur nye metoder til at udforske Mars overflade. Som en del af sit MESUR ( Mars Environmental Survey ) -projekt foreslår Ames Research Center at oprette et netværk af sensorer over hele planeten ved at starte hver gang lanceringsvinduet åbnes for Mars (ca. hvert andet år) fire små faste landere lanceret af en enkelt raket og hver til opgave at studere en given region. For at reducere omkostningerne er den teknik, der anvendes af disse sonder til at komme ned til jorden, forenklet: ingen radar, retro-raketter med fast tryk og et airbag-system til at annullere ankomsthastigheden til jorden. Hvert landingsudstyr er identisk og har en masse på 160 kg. Det er drevet af en radioisotop termoelektrisk generator til at tage billeder af webstedet og indsamle data med et seismometer og en vejrstation. Der skulle lanceres seksten sonder, inklusive de første fire i 1996. Deres levetid varede mindst 8 år, så hele netværket af instrumenter kunne fungere mindst to år samtidigt. En telekommunikationssatellit, der kredser om Mars, tilføjes for at muliggøre dataoverførsel til Jorden. De samlede omkostninger over et årti er US $ 1 mia. Langley-forskningscentret foreslår på sin side at anvende gennemtrængere , der frigøres af et køretøj, der stammer fra Viking-rumsonder.
Den Jet Propulsion Laboratory (JPL) havde tidligere studeret en mission for at vende tilbage jordprøver til Jorden fra Mars, der brugte en rover. JPL-embedsmænd lancerer undersøgelsen af en miniaturiseret version af denne rover. JPL-ingeniør Don Bickler tilbyder et simpelt 6-hjulet artikuleret affjedringssystem, der effektivt forhandler forhindringer på jorden af Mars. En prototype blev bygget i 1989.
Budgettet til MESUR-projektet stiger, efterhånden som undersøgelserne skrider frem, da NASA står over for budgetrestriktioner. NASA-embedsmænd beslutter at tildele det første lanceringsvindue i 1996 til en teknologisk demonstrator kaldet SLIM ( Surface Lander Investigation of Mars ). Dette er ansvarligt for at validere MESURs tekniske valg og dermed overbevise NASA-embedsmænd om at indsætte netværket af rumsonder. For sin del, det er Jet Propulsion Laboratory at udvikle en prototype af sin rover med en masse på 7,1 kg, og tilbyder det som en nyttelast for denne første mission. Roveren skal tillade anvendelse af seismometeret på jorden. Dette skal være i kontakt med jorden, så signalerne ikke krypteres af vibrationer, der er kommunikeret til rumsonde af vinden, temperaturvariationer, ..... På det tidspunkt overvejes ikke brugen af en robotarm til denne implementering en levedygtig løsning i betragtning af erfaringerne fra Viking-missionerne (det er dog denne løsning, der vil blive bevaret til implementering af InSight- seismometeret, der blev lanceret i 2018). NASA godkender udviklingen af projektet og overfører det til JPL. SLIM-demonstratoren omdøbes til MESUR Pathfinder. Af omkostningsårsager er seismometeret, raison d'être for MESUR-stationer, i sidste ende ikke om bord. Det betragtes som lavere prioritet end mini-roveren. Landingens levetid er begrænset til 30 dage (i stedet for de 8 år med MESUR-stationer), og solpaneler erstatter den termoelektriske generator til radioisotop . Endelig er landingssystemet ved hjælp af airbags den eneste funktion, der bevares fra MESUR-projektet. Sidstnævnte blev annulleret kort tid efter af budgetmæssige grunde, og fordi projekter af denne skala ikke længere passer ind i solsystemets efterforskningsstrategi, som den nye NASA-administrator fortaler.
Mål
Den mission, der svarer til amerikanernes tilbagevenden til Mars i tyve år, dens mål er i det væsentlige tekniske. Det er faktisk et spørgsmål om testprocedurer, der kan bruges senere på missioner, der er videnskabeligt ambitiøse og derfor dyrere.
- bevise, at mottoet " hurtigere, bedre og billigere " (hurtigere, bedre og billigere) kan anvendes på rummissioner (sonden blev udviklet på kun tre år til en lavere pris på 150 millioner dollars , fem gange mindre end Viking-projektet). Med andre ord at demonstrere, at det er muligt at gå til en anden planet ved hjælp af teknologi, der er både mere kompleks og til en rimelig pris. I dette tilfælde udgør omkostningerne til Pathfinder-missionen 280 millioner dollars inklusive ekstraomkostninger (jordoperationer under missionen og lanceringen af sonden);
- test en helt innovativ landingsmetode: kæmpe airbags, der dæmper sondens stød med jorden.
Landingssted
Vikingemissionerne inden landing på Mars var anbragt i kredsløb, hvilket havde gjort det muligt at studere og vælge landingsstedet på stedet. Efter at have nået Mars går Mars Pathfinder direkte ind i Mars-atmosfæren, hvilket betyder, at du skal vælge landingsstedet på forhånd for at placere rumsonde på den rigtige sti. Begrænsningerne er dog mindre alvorlige end for Viking-missionerne, fordi airbagsystemet gør det muligt at lande selv på relativt ujævn grund. Brug af solpaneler på den anden side pålægger en breddegrad, hvor Solen er ved højdepunktet på landingsdatoen. Endelig skal stedets højde være lav nok til at give rumsonde tid til at reducere dens hastighed tilstrækkeligt. I lyset af disse tekniske begrænsninger blev omkring tyve steder undersøgt af det videnskabelige samfund, samlet inden for rammerne af en workshop, der fandt sted i 1994. Det valgte landingssted, Ares Vallis , er en tidligere alluvial slette, der ligger på den nordlige halvkugle. af Mars på 19,4 ° nordlig bredde og 33,1 ° vestlig længdegrad. Det ligger cirka 850 kilometer sydøst for landingsstedet Viking 1. Stedet blev valgt, fordi der er en bred vifte af klipper inden for rækkevidde af den lille rover, hvoraf nogle sandsynligvis stammer fra det højlandsregion, der aldrig har været besøgt før .
Tekniske egenskaber
Mars Pathfinder rumsonde, der vejer 895 kg , består af fire forskellige dele:
- et krydstogtstadium, der er aktivt i transitfasen mellem Jorden og Mars, og som skubbes ud, inden rumsonde kommer ind i Mars atmosfære,
- en nedstigningsfase, der hovedsageligt omfatter et varmeskjold, der beskytter rumsonden under overfarten ved høj hastighed og en faldskærm, hvis rolle er at fuldføre reduktionen af hastigheden
- det forreste varmeskjold og faldskærmen frigives i den sidste fase af nedstigningen. De undervogn lander på jorden, der bremses af retro raketter derefter airbags. Landeren er hjertet i rumføleren: den inkluderer den indbyggede computer, kommunikationssystemet, to af de tre videnskabelige instrumenter.
- Sojourner- roveren er en mobil udvidelse af landeren og bærer et videnskabeligt instrument.
Enheden bestående af nedstigningsmodul og landingsudstyr (inklusive rover) vejer 570 kg.
Krydstogtsgulv
Krydstogtsetappen, der måler 2,65 meter i diameter og 1,5 meter høj, har en masse på omkring 300 kg inklusive 94 kg drivmidler ( hydrazin ). Dens rolle er at fuldføre adskillelsen med bæreraketten, at rotere rumføleren for at stabilisere den under transit mellem Jorden og Mars og at opretholde denne rotation, at foretage de nødvendige banekorrektioner i denne fase, d 'sikre kommunikation med Jorden og endelig placer nedstigningsmodulet i position til atmosfærisk genindtræden. Når denne sidste opgave er afsluttet, frigives den af nedstigningsmodulet. Den består af solpaneler med et overfladeareal på 4,4 m 2 ved hjælp af solceller af galliumarsenid og giver 250 til 450 watt. Den krævede energi til krydstogtfasen er 178 watt. For at korrigere sin bane og kontrollere dens orientering bruger krydstogtfasen 8 raketmotorer med et tryk på 4,4 newton, der brænder hydrazin, hvilket gør det muligt at ændre hastigheden på 130 m / s over hele missionen. Det andet udstyr er en mellemstærk forstærket antenne, der fungerer i X-bånd og til sidst solsensorer og stjernesigter, der bruges til at bestemme orienteringen (afledt af Magellans rumsonde .
-
De tre retro-raketter installeret på en ramme, der gengiver formen på det øverste skjold.
-
Test af retro-raketter på en mockup af det øverste skjold.
-
Oppustede airbags og gasgeneratorer.
Nedstigningsmodul
Nedstigningsmodulet beskytter den del af rumsonde, der skal lande på jorden mod varmen, der afgives under atmosfærisk genindtræden, reducerer derefter hastigheden, når du nærmer dig jorden ved hjælp af en faldskærm og derefter et par sekunder, før du rører ved jorden. raketter. Servicemodulet består af et frontvarmeskjold (det mest udsatte for varme) og et bageste varmeskjold, hvis form og struktur er direkte afledt af nedstigningsmodulet i Viking-rumsonderne. Udstyr måler modulets ydeevne under nedstigningen. Det inkluderer også en slids faldskærm, der også stammer fra vikingesonder og tre faste drivmiddel retro-raketter og en radar, der tillader hvis data bruges til at udløse de endelige operationer under nedstigningen. Nedstigningsmodulet har en masse på ca. 310 kg.
Lander
Landeren har, inden den indsættes på jorden, form af en afkortet pyramide med tre sider. Hver af de fire paneler, der danner denne pyramide, har trekantet form og er 1 meter firkantet. Det centrale panel fungerer som en understøttelse af kassen, der indeholder elektronikken og antennerne, de andre tre er forbundet til dette panel med samlinger udstyret med langsomme, men kraftige motorer. Under implementeringen åbner landeren som en blomst, så roveren (hviler på et af de tre sidepaneler) kan trække sig ud. Det hele måler derefter 2,75 meter i vingefang i en højde på 1,5 meter. I tilfælde af at understellet ikke lander ordentligt på bunden, men på et af sidepanelerne, er der tilvejebragt en enhed, der gør det muligt at rette det ud. Landeren har tre trekantede solpaneler med et areal på 2,8 m 2, der giver 1200 wattimer om dagen, når luften er gennemsigtig, og halvdelen af denne mængde, når støv hænger i luften. Energien lagres i sølvbatterier med en kapacitet på 40 ampere-timer. Alle de elektroniske komponenter er placeret i en central kasse placeret på det midterste kronblad, hvor en temperatur på mellem 0 og 20 ° C opretholdes . Denne kasse huser især den indbyggede computer, der bruger en IBM RAD6000 mikroprocessor, radiohærdet version af PowerPC . Dette har en massehukommelse på 128 megabyte til at gemme de data og fotos, der er taget. Kommunikationssystemet, der sikrer udveksling med jorden, men også med roveren, er også gemt i denne boks. Landeren har en stor forstærkningsantenne med en diameter på 30 cm (hastighed på 2250 bits pr. Sekund) samt en antenne med lav forstærkning.
Den vigtigste innovation, der er frembragt af Jet Propulsion Laboratory, er ballonsystemet, der fungerer som støddæmper i den sidste del af nedstigningen. Oppustet af gasgeneratorer otte sekunder før landing på jorden omgiver de fuldstændigt undervognen. Når den er implementeret, er forsamlingen 5,3 meter bred, 4,3 meter høj og 4,8 meter dyb. Disse airbags gør det muligt at undvige et fremdrivningssystem med variabel tryk for at nå jorden såvel som en sofistikeret styresoftware. Det eliminerer også risikoen forbundet med ujævnt terræn. Landing kan ske med en lodret hastighed på 14 m / s , en vandret hastighed på 20 m / s og i nærværelse af sten, der er 50 centimeter høje. Denne enhed er ikke rigtig ny, fordi den blev brugt af sovjeterne til at placere nogle af deres sonder på Månens overflade. Dens udvikling har ført til mange ændringer. Det oprindelige system, der kun bestod af et lag stof, vejede kun 15 kg, men test viste, at der ikke krævede mindst fire lag, hvilket bragte vægten til 85 kg.
Sojourner-roveren
Sojourner-roveren (opkaldt efter Sojourner Truth ) vejer 10,6 kg og er 65 cm lang, 48 cm bred og 30 cm høj. Udstyret med seks hjul kan den teoretisk bevæge sig væk op til 500 meter fra landingszonen. Rocker-bogie-affjedringssystemet blev udviklet af JPL og giver dets hjul på 13 centimeter diameter mulighed for at overvinde forhindringer på 20 centimeter og klatre 45 ° skråninger. Hvert hjul har en elektrisk motor i navet og kan rotere uafhængigt. Dens teoretiske bevægelseshastighed er 24 meter i timen, men i praksis vil den aldrig overstige 1 cm / s under jordoperationer på Mars. Energi leveres af et solpanel med et areal på 0,25 m 2 . Strømforbruget for udstyr og instrumenter er 16 watt. Om natten bruger det et ikke-genopladeligt lithiumbatteri. For at opretholde udstyret ved en acceptabel temperatur isoleres de termisk af blokke af aerogel, et materiale med meget lav densitet, men med meget god isoleringskraft. Denne enhed suppleres med tre batterier, der hver indeholder 2,6 gram plutonium 238, hvis opløsning er varme. Det er forbundet i UHF-bånd med landerens radiotransceiver. For sine bevægelser har Sojourner to driftstilstande. På den ene side kan den modtage instruktioner fra Jorden (via landeren). Operatøren analyserer billederne af det omgivende terræn for at definere bevægelsesinstruktionerne. Det kan også navigere autonomt ved at analysere refleksionen af lysstråler udsendt af fem lasere, den har foran. Denne analyse gør det muligt for ham at skelne mellem forhindringer og arbejde omkring dem. Hvis den ikke kan finde en passage, signaliserer den via radio til Jorden, at den er blokeret.
Videnskabelige instrumenter
Mars Pathfinder tager tre instrumenter: IMP-kameraet og ASI / MET-vejrstationen installeret på landeren og APXS alpha-protons røntgenspektrometer installeret på Sojourner- roveren .
IMP-kamera
IMP ( Imager for Mars Pathfinder ) er et farve stereokamera, der bruger to optikker til at give hævede billeder. Kameraet er fastgjort 1 meter over landingsudstyrets øverste dæk oven på en teleskopmast, der er lavet af et trådnet, der indsættes efter landing. Kameraet kan drejes 360 ° vandret og fra -73 ° til + 83 ° i højde. De to optikker, der er 150 millimeter fra hinanden, har en brændvidde på 23 millimeter og et synsfelt på 14,4 °. De er beskyttet mod eksternt støv af kondenserede silikaglas. De to indsamlede billeder returneres til to CCD-detektorer placeret side om side, hver med 256 × 256 pixels . På den optiske sti er der placeret et filterhjul bestående af fire par atmosfæriske filtre, to par filtre til reliefbillederne og 11 filtre beregnet til at afsløre geologiske formationer. En dioptrisk linse gør det muligt at tage nærbilleder af en lille magnet fastgjort i kort afstand fra IMP for at visualisere det støv, der klæber til magneten. Realiseringen af kameraet blev styret af University of Arizona med bidrag fra Lockheed Martin Company, Max Planck Institute of Aeronomy i Lindau ( Tyskland ), Technical University of Brunswick (Tyskland) og Niels Bohr Institute i København ( Danmark )
ASI / MET vejrstation
ASI / MET ( Atmospheric Structure Instrument / Meteorology Package ) instrumentet skal indsamle meteorologiske data såsom tryk, temperatur, vindhastighed og retning, når landeren er på jorden. Det skal også måle egenskaberne ved de atmosfæriske lag, der krydses under nedstigningen. Instrumentet, der har en masse på 2,41 kg, er udviklet af Jet Propulsion Laboratory . Den inkluderer fire termoelementer, der er ansvarlige for måling af temperatur med en nøjagtighed på 0,1 ° C. Disse er fastgjort på en 1 meter høj mast, som placeres lodret, når landeren er på jorden. Termoelementerne er jævnt fordelt og placeret på jorden og er 25 cm, 50 cm, 1 m høje. Trykket måles af en sensor, der stammer fra den, der bruges af vikingemissionerne . Tre vindsokker fastgjort i forskellige højder på den meteorologiske mast gør det muligt at måle både retning og hastighed på vinden. Retningen bestemmes ved regelmæssigt at tage billeder af vindsokene med IMP-kameraet.
APXS alpha proton røntgen spektrometer
APXS ( Alpha Proton X-Ray Spectrometer ) er en alfapartikel og et røntgenspektrometer, der bruges til at bestemme de kemiske grundstoffer, der findes i en stenprøve. For at opnå dette bombarderer instrumentet klippen, der skal analyseres med alfapartikler genereret af en radioaktiv kilde ( curium 244 ). Instrumentets detektorer analyserer derefter de partikler, der udsendes som reaktion på bombardementet. En siliciumdetektor analyserer alfapartikler, der returneres af atomernes kerner i klippen. Ved at måle deres maksimale energi kan han præcist bestemme tilstedeværelsen af lysatomer såsom kulstof , ilt og nitrogen . Det er mindre præcist for de tungere elementer. En anden siliciumdetektor måler også protonerne udvist af bombardementet og gør det muligt at identificere lysatomer (atommasse mellem 9 og 14) såsom natrium , aluminium , svovl og magnesium . Den tredje detektor analyserer røntgenstråler, der udsendes af de tungeste atomer (fra natrium) og gør det muligt at bestemme andelen af de tilstedeværende grundstoffer med en nøjagtighed tæt på ppm. Alle disse detektorer kan kun fungere, hvis deres temperatur er under -25 ° C eller -35 ° C (afhængigt af detektoren). En Peltier- effektkøler gør det muligt at sænke temperaturen på detektorerne, men for at begrænse energiforbruget foretrak missionscheferne ikke at bruge det og betjene instrumentet om natten, hvilket på Mars er kendetegnet ved meget lave temperaturer (-85 ° C ). Instrumentet er installeret på en arm, der er indsat foran Sojourner-roveren for at placere detektoren i kontakt med klippen. For at opnå resultater skal instrumentet forblive presset mod prøven i 10 timer. Instrumentet, der har en masse på 0,56 kg, er en kopi af det om bord på den russiske sonde Mars 96, der selv stammer fra de instrumenter, der bæres af de sovjetiske sonder Vega og Phobos. Det leveres af Max-Planck Institute for Chemistry i Mainz ( Tyskland ). Røntgendetektoren leveres af University of Chicago .
Gennemførelse af missionen
Lancering og transit mellem Jorden og Mars (4. december 1996 - 4. juli 1997)
Lanceringen blev udsat to gange, første gang på grund af dårligt vejr, den anden på grund af en computersvigt, som stoppede nedtællingen 4 minutter før motorerne blev tændt. Det finder endelig sted den4. december 1996kl. 06:58:07 ( UTC ), fra ESMC / Launch complex 17B . I løbet af de syv måneder, som rejsen til den røde planet varer, forsyner krydstogtfasen (en cylinder 2,65 m i diameter og 1,5 m i højden) Pathfinder med energi (takket være dens 2,5 m 2 solpaneler) og sikrer transmissioner med jorden (takket være en mellemstærk antenne). Udstyret med et fremdrivningssystem (to sæt med fire dyser og fire hydrazin-tanke) til kurskorrektioner, drejer det to gange i minuttet for at stabilisere sig. Takket være ham foretager sonden fire korrektioner den 10. januar, 3. februar, 6. maj og 25. juni.
| Ref. plan |
Tid | Begivenhed | Højde | Fart | |
|---|---|---|---|---|---|
 |
1 | T - 34 min | Frigivelse af krydstogtgulvet | 8.500 km | 7,26 km / s |
| 2 | T - 4 min | Begyndelsen af atmosfærisk genindtræden | 125 km | 7,26 km / s | |
| 3 | T - 2 min | Udvikling af faldskærm | 6-11 km | 350-450 m / s | |
| 4 | T - 100 s | Frigivelse af varmeskærm foran | 5-9 km | 95-130 m / s | |
| 5 | T - 80 s | Landingsanordning ophængt med reb | 3-7 km | 65-95 m / s | |
| 6 | T - 32 s | Radar måler afstanden på jorden | 1,5 km | 60-75 m / s | |
| 7 | T - 8 s | Airbags er oppustet | 300 m | 52-64 m / s | |
| 8 | T - 4 s | Skydning af retro-raketter | 50-70 m | 52-64 m / s | |
| 9 | T - 2 s | Landingsstel | 0-30 m | 0-25 m / s | |
| 10 | T + 15 min | Airbags tømmes | på jorden | ||
| 11 | T + 75 min | Tilbagetrækning af atmosfæriske airbags | |||
| 12 | T + 120 min | Fremsendelse af de første data | |||
| T = landingstid. | |||||
Ankomst til Mars (4. juli 1997)
Nedstigning til MarsjordLandingssekvensen begynder i en højde af 8.500 km , dvs. 35 minutter før kontakt med jorden, ved at skubbe krydstogtfasen ud, som nu er ubrugelig. I modsætning til vikingesonder kredser Pathfinder ikke om planeten, den kommer tilbage direkte i en højde af 130 km med en vinkel på 14,2 °. Sonden er beskyttet mod overdreven opvarmning af et varmeskjold med en diameter på 2,65 meter. Takket være denne “naturlige” bremsning reduceres Pathfinders hastighed til 1.440 km / t . Mens jorden kun var 9,4 km væk , blev en faldskærm i diameter på 11,5 m skubbet ud. Pathfinder's hastighed falder til 234 km / t . Tyve sekunder senere skubbes varmeskjoldet ud. Yderligere tyve sekunder forløber, før sonden sænkes ved enden af en 30 meter lang kevlarlinje, hvis ende er fastgjort til det øverste skjold (fastgjort til faldskærmen). Afstanden til jorden er kun 6,6 km . Når det kun er 300 m , otte sekunder før kontakt med jorden, puster klyngen af 24 beskyttende balloner sig rundt omkring på mindre end et sekund. To sekunder senere, når sonden kun er 50 m fra jorden, antændes de tre retro-raketter, der er nittet til det øverste skjold, øjeblikkeligt og stopper det hele i luften. Næsten samtidigt er kevlarflangen, der forbinder sonden til det øverste skjold, adskilt: Pathfinder bevæger sig de sidste tyve meter, der adskiller den fra jorden i frit fald og berører jorden med en hastighed på 19 m / s , det vil sige 68 km / t . Det var så fire og et halvt minut siden starten på dets genindtræden i atmosfæren, det rørte ved jorden af Ares Vallis . Det var derefter 2 timer 56 min 55 s om morgenen, mars tid (dvs. 16 h 56 min 55 s UTC . Landingsstedet var placeret som planlagt ved Ares Vallis, 19 kilometer sydvest for centrum af ellipsen. Koordinaterne er 19.33 ° breddegrad nord og 33,52 længdegrad vest. Mars Pathfinder hoppede femten til tyve gange sine airbags (oprindeligt op til 15 m høje), undertiden på klipper inden stabilisering.
Efter det, at landingsudstyret er frigivet, genvinder det øvre skjold en lille højde under kraften fra retro-raketterne, som fortsætter med at fungere i to sekunder for at trække det så langt som muligt fra landingsstedet og for at 'forhindre det i at falde tilbage på sonden. Landingsstedet er opkaldt Carl Sagan Memorial til ære for den amerikanske astronom og planetolog Carl Sagan , som havde været en stor forkæmper for udforskning af rummet, og som var død bare to uger efter lanceringen af rumsonde.
Aktivering af landingsudstyrEn antenne med lav forstærkning er fastgjort til toppen af rumføleren, og mens der var en ud af fire chance for, at rumsonde ville komme til hvile med basen hvilende på jorden (Hvis det ikke havde været tilfældet åbningen af kronblade ville have lagt landeren med højre side op) dette er, hvad der skete med Mars Pathfinder. Antennen giver rumsonden mulighed for straks at informere kontrolrummet om, at landingen er gået godt. Når det støv, der er rejst ved landingen, har lagt sig, tømmes puderne takket være åbningen af ventiler, og derefter trækkes de tilbage af kevlar-kabler for at tillade åbning af kronblade, der afgrænser hjertet af rumsonde. Landerens kronblade åbner og udsætter dens solpaneler. Når landingen har fundet sted om natten, er det nødvendigt at vente på solopgangen, så solpanelerne kan levere energi og overtage batterierne. Kameraet bruges til at bestemme solens position, hvilket igen gør det muligt at orientere antennen med høj forstærkning mod Jorden og sende den første detaljerede information til Jorden.
I løbet af den første dag på Mars overflade tager kameraet de første billeder, og der tages nogle vejrmålinger. Ingeniørerne indser derefter, at en af puderne ikke er tømt helt ud, og at den derfor kan forstyrre afstigning fra roveren. For at løse dette problem hæver de og sænker derefter et kronblad af landeren flere gange for at flade puden. De data, der blev transmitteret den dag, indeholder dem, der blev indsamlet under nedstigningen for første gang for at have en lodret temperaturprofil af Mars-atmosfæren om natten. Dataene fra sensorer, der er begravet i varmeskjoldet, gør det også muligt at validere designet på dette udstyr, som vil blive taget op af følgende Mars-rumsonder. Telemetri indikerer, at landeren har en reduceret hældning på 2 °.
Jordoperationer (4. juli - 27. september 1997)
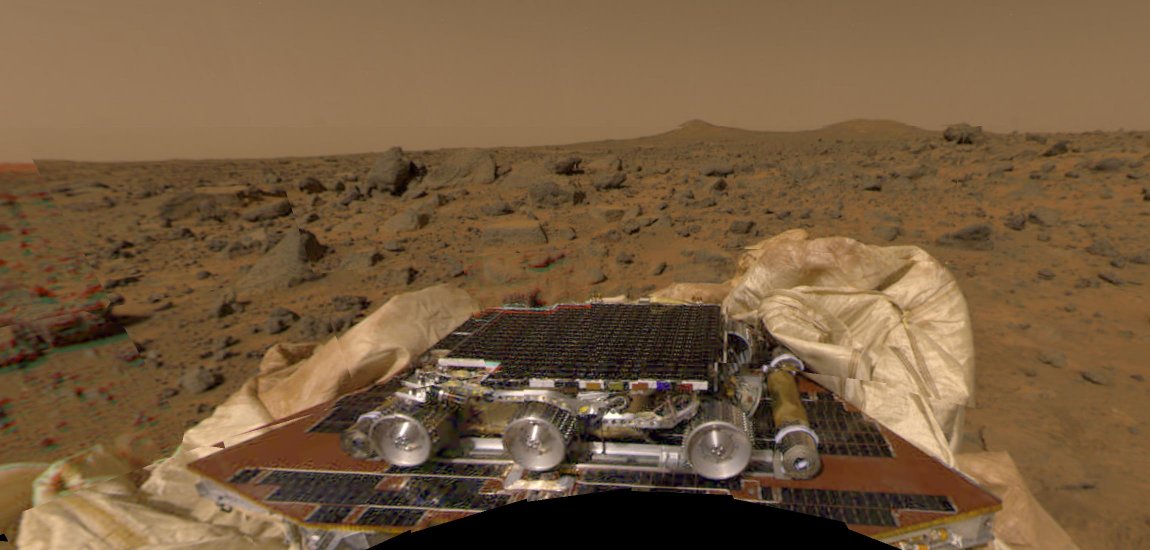
Opdagelse af landingsstedetDe omkringliggende fotos viser et væld af små klipper med forskellige former, strukturer og farver, der glæder geologer. Desuden, mens det nærliggende terræn er ret fladt, vises små krusninger nogle få meter væk, og to bakker over 50 meter høje, den ene med en konisk top og den anden med en flad top, er synlige i horisonten. Fjernt 860 meter, de bliver hurtigt døbt Twin Peaks . På siderne af disse bakker er der spor af aflejringer, strømme og terrasser dannet af strømme. Syd for stedet er en bølgning faktisk læben på et krater med en diameter på 1,5 km, der på tidspunktet for dets dannelse skød sten ud, der blandede sig med dem, der sandsynligvis blev transporteret af oversvømmelserne. Små fremspring, der er synlige i horisonten, svarer til relieffer, hvoraf den fjerneste synes at være omkring fyrre kilometer væk. Nogle klipper er meget skarpe, andre er afrundede eller viser tegn på erosion af vinden, der aldrig havde været observeret før på planeten. De afrundede småsten , klipperne ofte vippet eller justeret på en nordøstlig akse, ser ud til at bekræfte afhandlingen om snavs, der bæres der af oversvømmelser.
Himlens farve er en overraskelse for forskere. Selvom der ikke har været nogen større støvstorm i årevis, er denne lyserød i farve, hvilket antyder, at støvet, der forårsager denne farve, er permanent til stede i atmosfæren. Airbag-tilbagetrækningsoperationen afslørede jorden umiddelbart under overfladen, som er mørkere. Andre mørke pletter er længere synlige på billederne taget af kameraet. De ser ud til at indikere, hvor airbags rørte jorden, før de kom igen. Ingeniører og forskere navngav hurtigt de omgivende klipper ved at give dem navnene på fiktive karakterer, især tegnefilm : Barnacle Bill , Yogi , Scooby Doo , Casper , Boe , Stimpy , Bullwinkle , Wedge ...).
Lander roverenLandingen af Sojourner-roveren på Mars-jord gik ikke uden problemer. To landingsramper rulles ud den ene foran, den anden bag roveren. Men frontrampen rører ikke jorden. Den bageste er på den anden side i kontakt med jorden, men det kræver pilotering af roveren baglæns uden at drage fordel af kameraerne, der alle er placeret foran på køretøjet. Derudover løber en airbag lidt over rampen, og radioforbindelserne mellem Sojourner og Mars Pathfinder forstyrres. Ingeniørerne beslutter at udskyde landingen af roveren til den næste dag. Da kommunikationen blev genoprettet den næste dag, genstartede Sojourners computer af en uklar årsag, men denne begivenhed løste kommunikationsproblemerne mellem roveren og landeren. Ingeniørerne udløser de pyrotekniske ladninger, der frigør roveren fra dens lænker og sender opstartsinstruktionen. Roveren sænker sig bagud på den bageste rampe og rører ved Mars-jorden omkring ti minutter senere.
Udforskning af landingsstedetUmiddelbart efter landning bruger roveren sit spektrometer til at bestemme sammensætningen af Marsjord den følgende nat. IMP-kameraets teleskopstøtte er indsat, som gør det muligt at placere det i en højde på 1,4 meter. Den næste dag placerer Sojourner sit APXS- spektrometer i omvendt kontakt med klippen kaldet Barnacle Bill og tager fra denne position et billede af rumsonde, men de deflaterede puder blokerer delvis hans synsfelt. Analyse af klippen, en første på Mars, afslører en overraskende andel silicium, der antyder tilstedeværelsen af kvartslignende andesit på Jorden. Men dette resultat bestrides, fordi det kunne komme fra et overfladisk lag, der ikke er relateret til klippen, og skabt ved udsættelse af dette for elementerne og for bombardementer af partikler (solvind, kosmiske stråler). En anden sten kaldet Yogi , stor i størrelse, afrundet i form og spændende bestående af to farver, udgør det andet undersøgte mål. Men efter en fejlagtig tilgangsmanøvre, derefter adskillige på hinanden følgende anomalier, tager det fire dage for spektrometeret at blive placeret mod klippen. Efterfølgende analyserer Sojourner en hvid sten kaldet Scooby Doo og derefter en del af sandjord. For første gang bruger han sit autonome navigationssystem til at komme rundt.
I løbet af denne tid bruges Mars Pathfinder-kameraet til at tage panoramaer, hjælpe roveren i dets navigation ved at tage billeder af sin position i slutningen af hver dag og fotografere vindsokker og magneter, der bruges til at opsamle det magnetiserede støv. De taget billeder viser, at roverhjulene afslører dele af lyserød jord. Efter at have undersøgt en klippe kaldet Souffle besluttede grundkontrollerne at omgå landeren med roveren for at bevæge sig mod en gruppe klipper kaldet Rock Garden ("klippehaven"). 38 dage er gået siden landing, da Sojourner nåede sit mål. Roveren, efter en fejl i en sensor, forpligter sig til at hejse sig selv på en klippe, der bringer sin hældning på 20 °. Beskyttelsesmekanismerne udløses, og rovers fremskridt stoppes. I løbet af de næste 20 dage scanner roveren Sharp, Moe og Half Dome-klipperne. Den 58 th dag, batterierne Sojourner stoppe arbejdsbetingelser: spektrometret ikke længere kan bruges i dag, når solcellerne på toppen af rover levere energi. Den 76 th dag Sojourner formår at fotografere et felt af små klitter usete af kameraet Mars Pathfinder.
Samtidig akkumulerer instrumenterne observationer af Mars atmosfære. Fotos af marsmørke og måling af faldet i elproduktion ved hjælp af solpaneler bruges til at måle andelen af støv i atmosfæren. Mængden af vand i suspension ved at tage billeder af solen med filtre, der svarer til absorptionslinjerne for vanddamp. Skyer af blå vandis ses undertiden på himlen. Temperaturen i forskellige højder over jorden måles kontinuerligt.
Missionens afslutning (27. september)
Efter at have studeret Rock Garden-webstedet planlægger projektteamet at sende Sojourner meget længere for at vurdere hans evner og hjælpe med at udvikle den næste generation af rovere. Men opladning af batteriet af Mars Pathfinder forværres gradvist. En endelig kontakt med rumføleren finder sted den27. september 1997kl. 10:23 universel tid . det28. september, reagerer rumsonden ikke længere. Den nøjagtige årsag til standsning af transmissioner er ikke sikker, men stoppet skyldes sandsynligvis udtømning af batteriet om natten, hvilket ville have nulstillet det interne ur til 0. Når dagslyset vender tilbage, og energien strømmer igen, er den indbyggede computeren kunne ikke have fundet Jorden og pegede derfor den parabolske antenne mod den. En kort forbindelse genetableres på 1 st og7. oktobermen uden overførsel af data. Da elektronikken udsættes for en lavere og lavere temperatur hver nat, er det sandsynligt, at de er ophørt med at arbejde om dagen efter et stykke tid. Ingeniører opgiver10. marts 1998 forsøg på at skabe kontakt.
Mission resultater
Under opholdet på Mars overflade blev der taget 17.050 billeder (inklusive 550 fra roveren) og transmitteret, og der blev foretaget 8,5 millioner målinger af atmosfærisk tryk , temperatur og Mars vindhastighed. Roveren rejste hundrede meter og gennemførte 230 manøvrer, der udførte kemisk analyse af seksten forskellige klipper og jordpletter spredt over et område på ca. 250 m 2 . Missionen, der var planlagt til at vare syv dage, varede 12 gange så længe.
På et rent videnskabeligt niveau er resultaterne af missionen, som primært var teknologisk, relativt dårlige:
- kemisk analyse af klipper og jord indikerer en signifikant siliciumkoncentration, hvilket antyder, at de originale materialer er differentierede. De analyserede klipper har karakteristika, der adskiller sig fra de meteoritter, der er indsamlet på jorden, og som antages at være af Mars-oprindelse.
- småsten og klipper, der findes på jorden samt indeslutninger i nogle klipper, der alle er præget af afrundede former, antyder, at Mars engang oplevede et varmt klima, der tillod flydende vand at strømme på overfladen.
- riller og riller, der er synlige på nogle klipper, tyder på, at de er blevet eroderet af partikler på størrelse med et sandkorn. Klitformede aflejringer nær landingszonen indikerer også tilstedeværelsen af sand.
- Jordkemien på landingsstedet svarer til den, der landes på Viking 1 og Viking 2.
- Sporing af radioudsendelser fra Mars Pathfinder indikerer, at metalkernen i Mars har en diameter på mellem 1.300 og 2.000 kilometer.
- støv i atmosfæren består af magnetiserede partikler 1 mikron i diameter. Det er sandsynligt, at det magnetiske mineral er maghemit, en af varianterne af jernoxid, som blev deponeret og cementeret støvpartiklerne under påvirkning af kulde og tørke. Jernet ville komme fra udvaskning af klipper i den varme fase, som Mars ville have kendt.
- støvhvirvler er blevet observeret ofte og antyder, at de danner den mekanisme, der sprøjter støv ind i Mars atmosfære.
- de taget billeder viser tilstedeværelsen af vandisskyer i den lavere atmosfære i starten af dagen. Disse forsvinder, når atmosfæren opvarmes.
- pludselige temperaturændringer blev målt om morgenen, hvilket tyder på, at atmosfæren opvarmes af jordens overflade, og at denne varme diffunderes af opsamling.
- klimaet svarer til landingsstedet for Viking 1 med hurtige ændringer i tryk og temperatur, svækket vind natten over og generelt let vind. Overfladetemperaturer er generelt 10 ° C varmere end på Viking 1-stedet.
- atmosfæren har en lyserød farvetone på grund af tilstedeværelsen af fine støvpartikler i den nedre atmosfære, et fænomen, der allerede er observeret på landingsstederne i Viking-rumsonder. Størrelsen og formen på støvpartikler og mængden af vanddamp, der er til stede i atmosfæren, svarer til hvad der er fundet af vikingelandere.
Følgende rovere
Selvom dens rækkevidde var meget begrænset, var Sojourner den allerførste maskine til at bevæge sig på Marsjord. Siden da er fem andre rovere, de første fire udviklet af det amerikanske rumagentur, og den kinesiske rover Zhurong landet på Mars:
- Spirit : det er en af de to rovere i Mars Exploration Rover (MER) -projektet. Efter at have forladt Jorden10. juni 2003landede den på Mars den 4. januar 2004. Aktiv indtil 2009 rejste han 7,7 km før han sidder fast i en klit.
- Mulighed : Spirit's tvilling - ligesom ham - forlod Jorden i sommeren 2003 og landede på Mars ijanuar 2004. Men han var meget mere modstandsdygtig end ham, da han forblev aktiv i mere end fjorten år og dermed kørte mere end 45 km . Det blev sovnet af NASA den10. juni 2018efter voldsomme storme, som forurenede dens solpaneler. Ifebruar 2019, Meddeler NASA officielt sin nedlukning.
- Nysgerrighed : lanceret den26. november 2011, tungere og mere kraftfuld end de to "MER", er denne rover ikke, ligesom dem, drevet af solpaneler, men af en nuklear generator, der gør det muligt at operere i alle årstider og dag og nat. Efter at have nået Mars overflade den6. august 2012, han rejste 23,33 km videre12. november 2020.
- Udholdenhed : Efter en lancering den 30. juli 2020 landede denne nye rover den 18. februar 2021 inde i Jezero-krateret med en diameter på 49 kilometer nær den nordvestlige kant af det. Med en arkitektur svarende til sin forgængers har Udholdenhed flere videnskabelige instrumenter, der gør det muligt at opdage spor af liv.
- Zhurong : (i kinesisk祝融, Zhurong ) er den første kinesiske Mars rover tilhører Tianwen-1 mission lanceret til Mars på23. juli 2020kl. 12 timer 41 (UTC + 8) fra lanceringsbasen Wenchang . Han landede på14. maj 2021, hvilket gør Kina til det andet land, der med succes lander på Mars og etablerer kommunikation fra Mars-overfladen efter USA . Zhurong blev med succes implementeret den 22. maj 2021 kl. 02:40 UTC.
I populærkulturen
- i filmen Red Planet bruger truede astronauter på Mars dele af Sojourner til at lave en improviseret radio og kommunikere med deres rumskib.
- i Star Trek: Enterprise-serien vises Sojourner kort som et historisk monument.
- i romanen Alene on Mars og dens filmtilpasning rejser en forladt astronaut på Mars til Pathfinder for at hente og reparere sonden for at kommunikere med Jorden.
Noter og referencer
Bemærkninger
- metode kan dog kun anvendes på små maskiner, så den kan ikke generaliseres.
- Denne metode vil blive brugt til landing af Curiosity i 2012.
Referencer
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 442-443
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 443
- (i) Philippe Labro, " En chance hvert 20. år: MÅLING " på officielle hjemmeside SEIS-INDSIGT , Institut de physique du Globe de Paris (adgang 24 November 2018 )
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 451-452
- Mars Pathfinder Mission (Golombek) , s. 3954
- (in) " Mars Pathfinder Fact Sheet " , NASA (adgang 23. november 2018 )
- Mars PathfinderLanding Press kit , s. 28
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 445
- Philippe Labrot, “ Mars Pathfinder ” , på P. Labrots hjemmeside (adgang 23. november 2018 )
- (da) " Mars Pathfinder Instrument Beskrivelser " , på Mars Pathfinder officielle side , NASA ,23. november 2018
- Philippe Labrot, “ Mars Pathfinder - Les instruments scientifique ” , på P. Labrots hjemmeside (adgang 23. november 2018 )
- (i) " Mars Pathfinder: Indtastning afstamning og Landing " på officielle hjemmeside Mars Pathfinder , NASA (adgang 23 November 2018 )
- Foto: http://www.astrocosmos.net/articles/mission/pathfinder-sojourner.jpg
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 454
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 454-455
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 455-456
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 456-457
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 457-458
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 458
- Robotisk efterforskning af solsystemet Del 2 Pauser og fornyelser 1983-1996 , s. 460
- Golombek 1997 , s. 1
- (i) NASA Press Kit: Mars Polar Lander / Deep Space 2 , NASADecember 1999( læs online ) , s. 14
- Mulighedsopdateringer
- NASA bekræfter dødsfaldet fra Mars-roboten Opportunity , Le Monde , den 13. februar 2019.
- (in) " NASAs Record-Setting Opportunity Rover on Mars Mission Comes to End " på nasa.gov ,13. februar 2019(adgang 14. februar 2019 ) .
- Du kan jævnligt følge dens kilometertal på et JPL-sted: http://mars.nasa.gov/msl/mission/whereistherovernow/
- Andrew Jones , " Tianwen-1 lancerer til Mars, der markerer begyndelsen på kinesisk interplanetarisk efterforskning ", SpaceNews ,23. juli 2020( læs online , hørt 23. juli 2020 )
- Steven Lee Myers og Kenneth Chang , " Kinas Mars Rover-mission lander på den røde planet ", The New York Times ,14. maj 2021( læs online , adgang 16. maj 2021 )
- Rémy Decourt, " Mars: første omdrejninger af hjulene til Zhurong-roveren " , om Futura Sciences ,24. maj 2021
- Lei Zhao , “ Kinas Zhurong-rover bevæger sig på Mars overflade for at begynde videnskabelige operationer ”, China Daily ,22. maj 2020( læs online , konsulteret den 22. maj 2021 )
{kind=link}
Bibliografi
NASA
- (en) NASA, Mars Pathfinder Landing ,Juli 1997( læs online )Pressesæt leveret af NASA til landing af Mars Pathfinder
- (en) Mathew P. Golombek , T. Economou , WM Folkner et al. , " The Mars Pathfinder Mission " , Journal of Geophysical Research , bind. 102, n o E2,25. februar 1997, s. 3953-3965 ( DOI 10.1029 / 96JE02805 , læs online ) - Præsentation af missionen
- (en) MP Golombek , T. Economou , WM Folkner et al. , " Oversigt over Mars Pathfinder-missionen og vurdering af forudsigelser for landingssteder " , Science , bind. 278, nr . 5344,5. december 1997, s. 1743-1748 ( DOI 10.1126 / science.278.5344.1743 , læs online ) - Resumé af resultaterne af Mars Pathfinder-missionen
- (en) PH Smith , JF Bell III , NT Bridges et al. , “ Resultater fra Mars Pathfinder Camera ” , Science , bind. 278, nr . 5344,5. december 1997, s. 1758-1765 ( DOI 10.1126 / science.278.5344.1758 , læs online ) - Resumé af resultaterne af Mars Pathfinder-missionen
Andre værker
- (da) Paolo Ulivi og David M Harland, robotundersøgelse af solsystemet Del 2 Hiatus og fornyelse 1983-1996 , Chichester, Springer Praxis,2009, 535 s. ( ISBN 978-0-387-78904-0 )Historie og detaljeret forløb af interplanetariske missioner mellem 1982 og 1996
- (en) Peter J. Westwick, Into the black: JPL and the American space program, 1976-2004 , New Haven, Yale University Press ,2006, 413 s. ( ISBN 978-0-300-11075-3 ) - Historien om Jet Propulsion Laboratory mellem 1976 og 2004
- (en) Erik M. Conway, efterforskning og teknik: Jet fremdrivningslaboratoriet og søgen efter Mars , Baltimore, Johns Hopkins University Press ,2015, 418 s. ( ISBN 978-1-4214-1605-2 , læs online ) - Historie om Jet Propulsion Laboratory's Mars-efterforskningsprogram
Se også
Relaterede artikler
- Udforskning af Mars-systemet
- Mars Exploration Rover
- Alpha Particle og X-Ray Spectrometer
- Astromobile
- Discovery Program og Mars Surveyor Program
- MESUR opgav projekt ved oprindelsen af Mars Pathfinder-missionen
- Mutex (denne artikel beskriver den computerfejl, som missionen var offer for).